DREHEN & BOHREN
Die Verkettung der Fertigungsschritte Drehen und Bohren mit einer Robotereinheit gestaltet die Produktion der Werkstücke deutlich effektiver und wirtschaftlicher und sorgt für die schnelle Amortisation der getätigten Investition.
AUTOMATIONSLÖSUNG FÜR DIE VERKETTUNG VON ZWEI ARBEITSSCHRITTEN
„Um die Produktion unserer Anschlagwirbel effektiver und wirtschaftlicher zu gestalten, verketten wir in der Fertigung des Wirbelkörpergehäuses die Arbeitsgänge Drehen und Bohren mit einem Industrieroboter“.
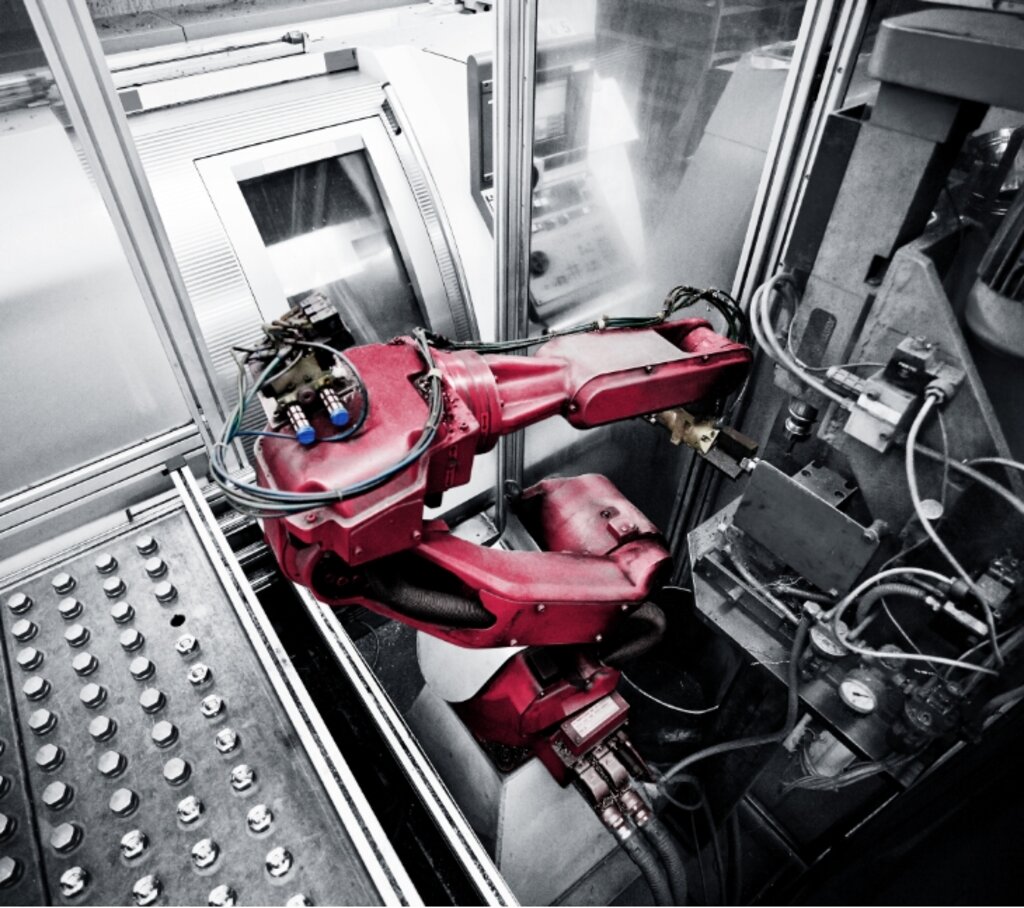
Die stationär eingerichtete Standard Robot Cell mit Palettiereinheit und seitlich angeordneter Bohrvorrichtung wird im Arbeitsradius des Roboters direkt vor die Drehmaschinen platziert. Mit einem Doppelgreifer ausgestattet, versorgt sie im ersten Arbeitsschritt die Drehmaschine mit einem Wirbelkörperrohling und bestückt direkt im Anschluss die Bohrmaschine mit dem aus der Drehmaschine entnommenen Wirbelkörpergehäuse. Während die Drehmaschine das Gehäuse des Wirbelkörpers fertigt, wird parallel im zweiten Arbeitsgang die Bohrung angelegt. Der fertige Wirbelkörper wird auf der Palette abgelegt. Danach nimmt der Roboter einen neuen Rohling auf und begibt sich in Wartestellung.
IHRE VORTEILE
Wirtschaftlichere Fertigung durch Verkettung von zwei Arbeitsgängen mit einer Robotereinheit
Robuste Verarbeitung und geringer Wartungsaufwand minimieren Standzeiten
Schnelle Amortisation der getätigten Investition ohne Verluste
DAS MACHT UNSERE ROBOTER
IM ANWENDUNGSFALL DREHEN & BOHREN AUS
SICHERE AUFNAHME
DES ROHLINGS
Mit einem speziell auf das Bauteil abgestimmten Greifer nimmt der Roboter den Rohling sicher auf.

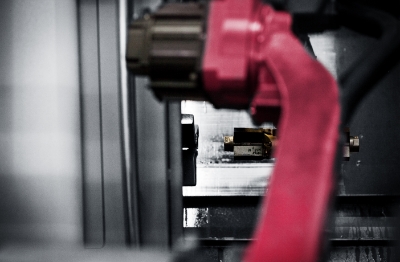
SCHNELLE ENTNAHME AUS DER DREHMASCHINE
Nach dem Drehen reinigt der Roboter das Werkstück mit Druckluft und entnimmt es aus der Spannvorrichtung der Drehmaschine.
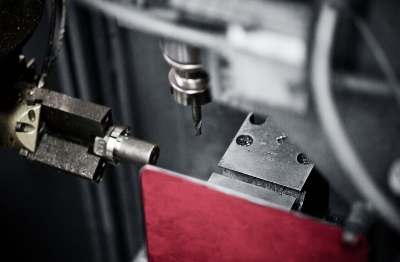
PRÄZISE AUSFÜHRUNG DER BOHRUNG
eine Bohrung in das Gehäuse eingebracht …

SCHNELLE BESTÜCKUNG DES DREHFUTTERS
Nach Beendigung des Drehvorgangs entnimmt der Roboter mit einem Greifer das fertige Werkstück, dreht den Greifer um 180° und bestückt das Drehfutter über den zweiten Greifer mit dem Rohling.
ZÜGIGE ENTNAHME DES WERKSTÜCKS
… und das nun fertige Bauteil aus der Bohrvorrichtung entnommen.
ZUVERLÄSSIGE ABLAGE DES WERKSTÜCKS
Abschließend legt der Roboter das bearbeitete Bauteil auf der Palette ab und nimmt direkt einen neuen Rohling auf.

ALLE UNSERER ANWENDUNGSBEREICHE AUF EINEN BLICK

ALLE INFORMATIONEN KOMPAKT –
JETZT UNSEREN KATALOG HERUNTERLADEN!
SIE HABEN GEFUNDEN, WAS SIE SUCHEN
ODER BRAUCHEN INDIVIDUELLE BERATUNG?